Hallo,
Ik wou vandaag eens proberen of ik de snelheid van een brushed DC-motor kan meten aan de hand van de geïnduceerde spanning (de BACK-EMF voltage) en in welke mate dit precies is. Ik heb voor een robotica projectje een snelheidsregeling voor een DC-motor nodig waar ik normaal een rotary encoder ga gebruiken. Toch wou ik eens uit nieuwsgierigheid meten hoe ver je kan geraken met de "Back-emf methode".
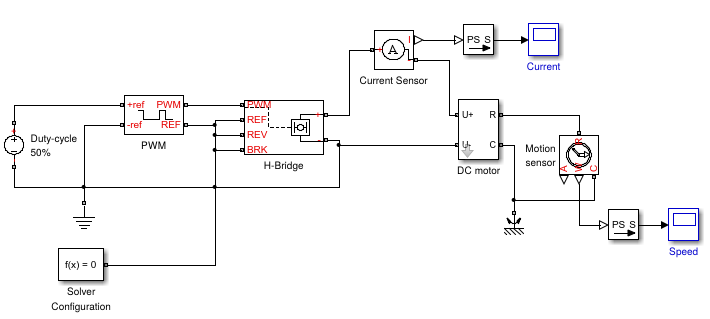
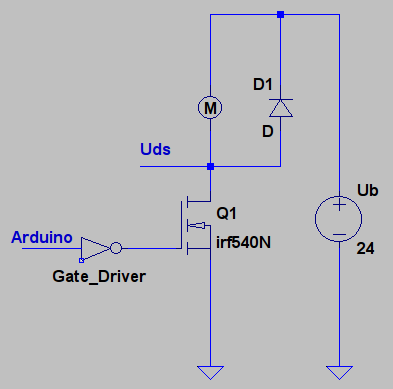
Meetopstelling:
De duty-cycle is regelbaar via een potmeter, de frequentie bedraagt 20kHz. De gate driver heeft een geïnverteerd ingang dus de motor
is actief wanneer het stuursignaal idle (0V) is.
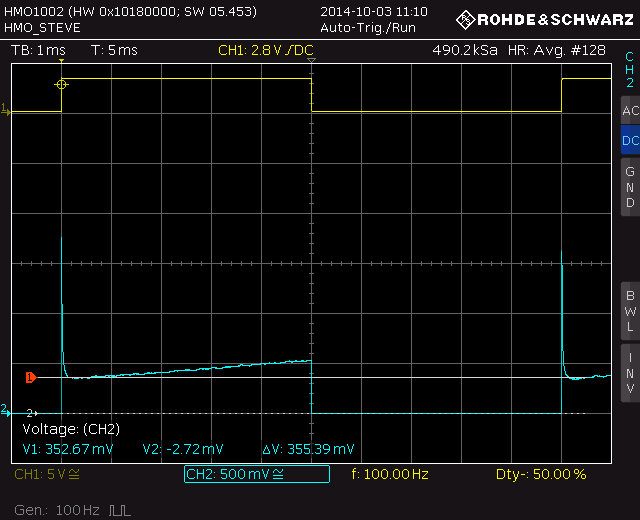
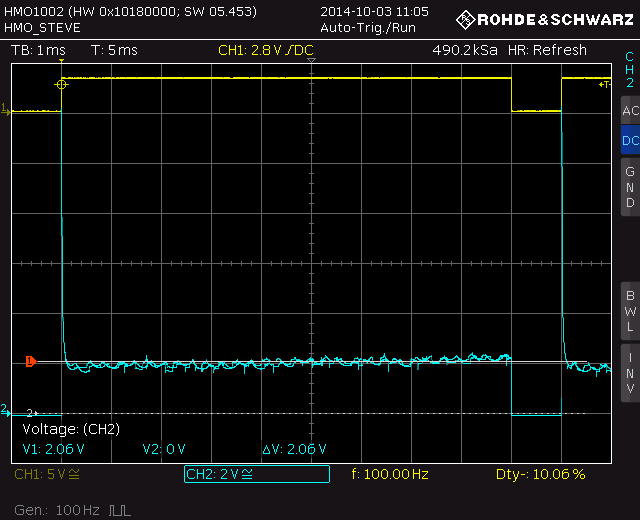
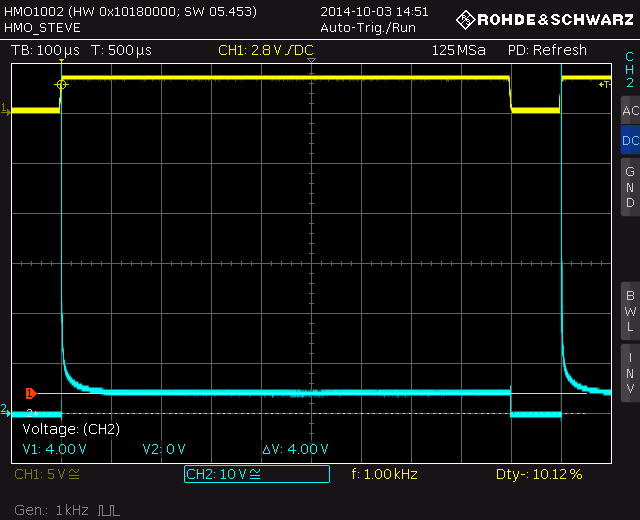
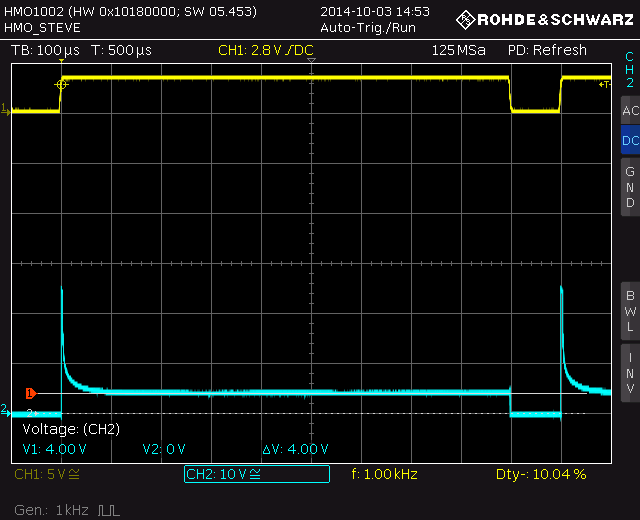
Meetresultaten:
1. Duty-cycle 10%, Uemf = Um - Uds = 24V*0,1 - 12,64V = -10,24V 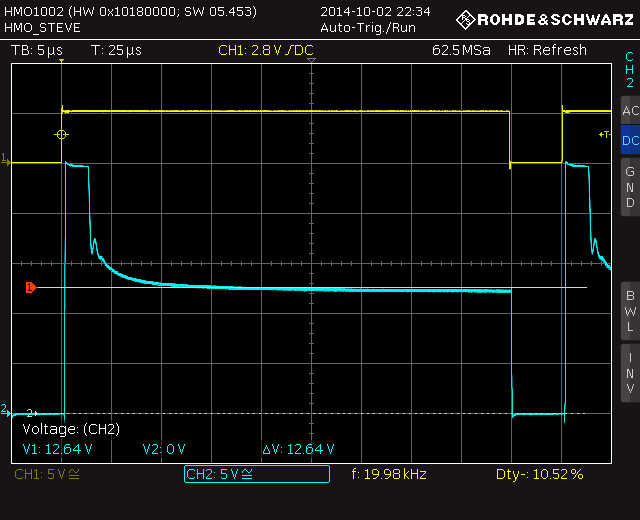
2. Duty-cycle 20%, Uemf = Um - Uds = 24V*0,1 - 5,72V = -0,92V 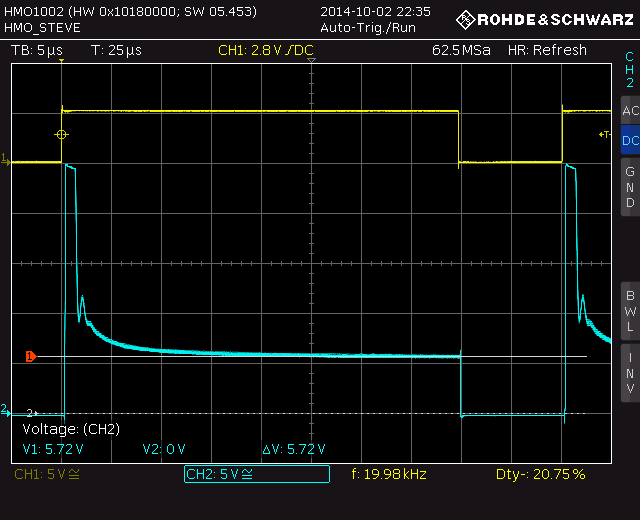
3. Duty-cycle 30%, Uemf = Um - Uds = 24V*0,1 - 3,62V = 3,58V 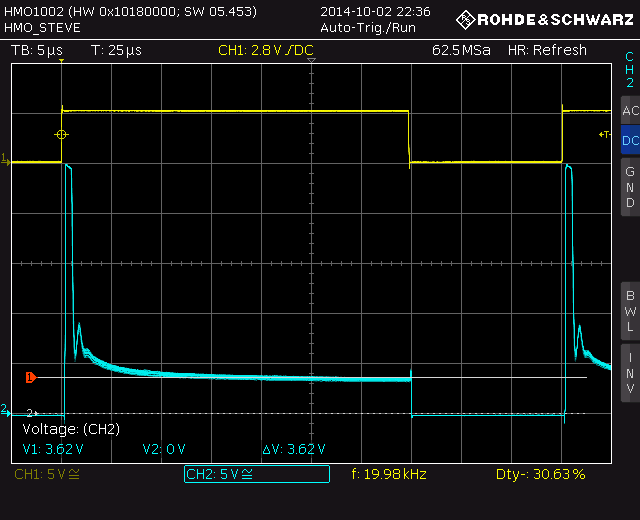
4. Duty-cycle 40%, Uemf = Um - Uds = 24V*0,1 - 2,41V = 7,19V 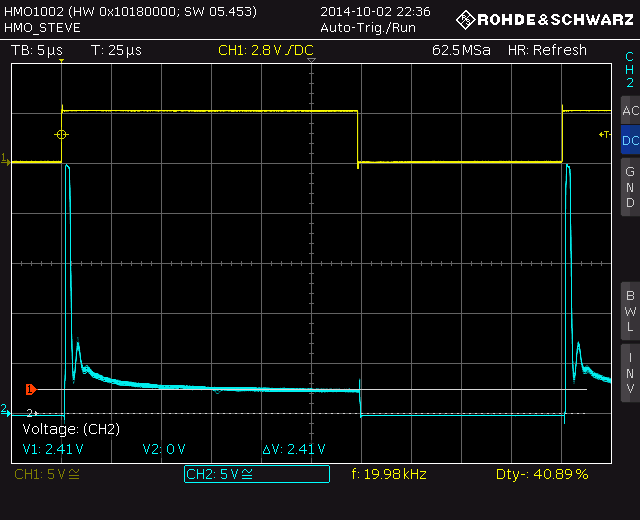
5. Duty-cycle 50%, Uemf = Um - Uds = 24V*0,1 - 1,81V = 10,19V 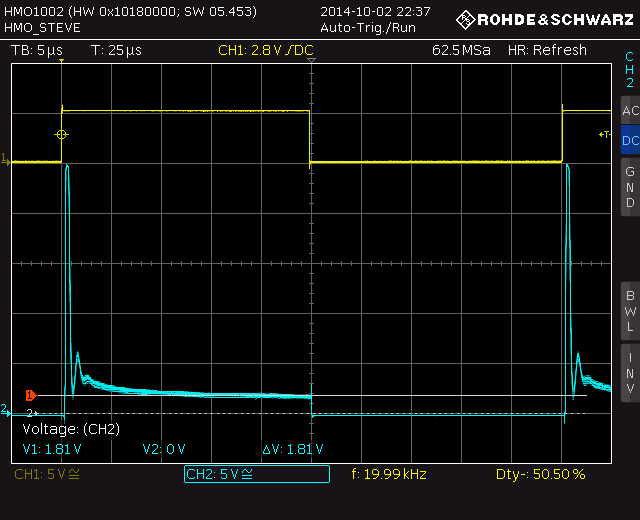
6. Duty-cycle 60%, Uemf = Um - Uds = 24V*0,1 - 1,21V = 13,19V 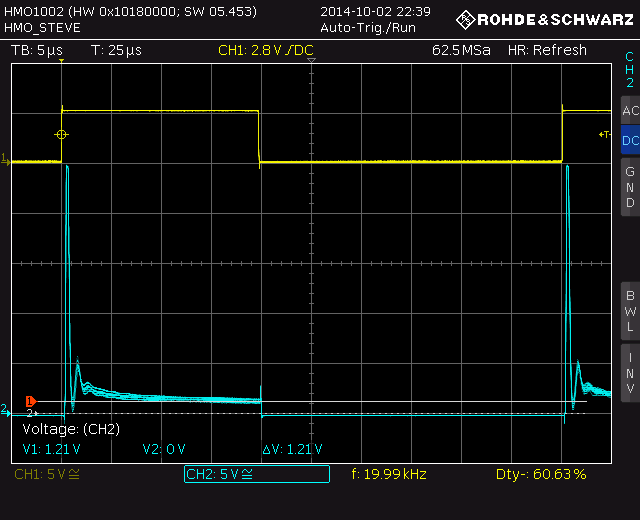
7. Duty-cycle 70%, Uemf = Um - Uds = 24V*0,1 - 0,907V = 15,893V 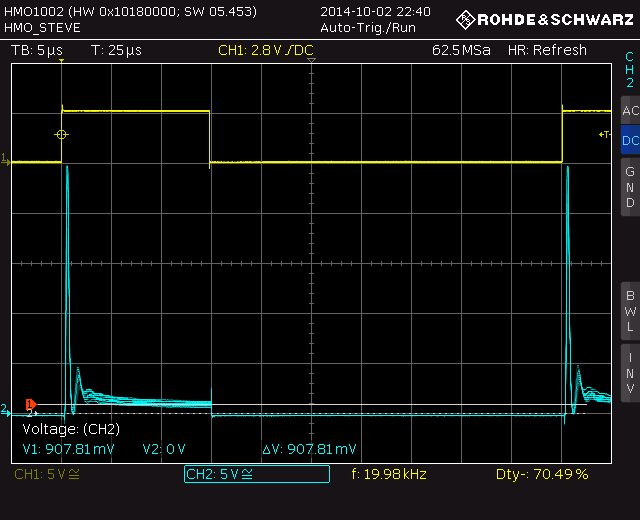
8. De meetresultaten in tabelvorm: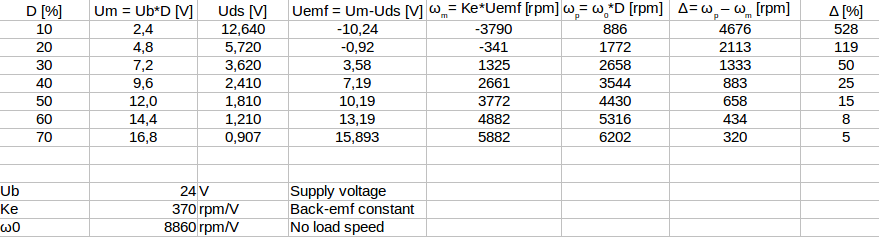
Verder...
De back-emf spanning stijgt naar mate de snelheid toeneemt, dit klopt. Wat ik niet begrijp is waarom de meetresultaten beter worden wanneer de duty-cycle (gemiddelde motorspanning) toeneemt. De eerste twee metingen bij 10% en 20% zijn totaal afwijkend terwijl de laatste meting slechts een fout van 5% heeft.
Ik vermoed dat het iets te maken heeft met de interne inductantie van de motor maar momenteel blijft het gissen. Ik zou het fijn vinden mocht iemand mij wat op weg kunnen helpen om dit probleem op te lossen. Alvast bedankt.
Steve