nog een vraag, hebben we een 1-polige of een 2-polige schakelaar nodig?


nog een vraag, hebben we een 1-polige of een 2-polige schakelaar nodig?
Pffff wat is hier veel over geschreven. Maar het is ook een intrigerend onderwerp. Ik zie het nu pas voor het eerst. Goed dat jullie naar de TUD gaan voor de microcomputer. Ze hebben daar voor de studenten leuke dingen ontworpen, o.a. met een 8051. Kun je zó met een PC programmeren.
Een gekke inval die ik kreeg: Kun / mag je voor de meting geen stuk naaigaren aan de bal bevestigen? Je zou dat netjes neergevleid in een bak kunnen leggen, bijvoorbeeld de deksel van een doos printerpapier en dan de bal slaan of gooien. Het naaigaren wordt dan meegetrokken door een oogje / ringetje heen en dan hoef je alleen maar de snelheid van het garen aldaar te meten. Het is zo dun en licht dat ik denk dat het de snelheid van de bal nauwelijks beïnvloedt. Het hoeft tenslotte niet voor pingpongballen te werken.
Het hangt af van de omschrijving in de opdracht of je dat kunt doen. Het maakt julie het leven een stuk gemakkelijker als het om de sensor gaat. Bovendien meet je de snelheid vanaf het oogje / ringetje, in welke richting de bal ook gaat.
Special Member
@wizzel: ik krijg een beetje een spuit 11 gevoel. Heb je het hele topic al doorgelezen? Het idee is al voor een groot deel klaar en gaat om een wedstrijd verband, dus geen moment opname....
.1 kan je idee dan dus niet
.2 is het idee al door TS zelf aangedragen en voor een dele uitgevoerd, dus ben je betrekkelijk laat!
klopt
we hebben de meeste componenten al besteld (nog niet binnen  ) en het idee is zo goed als af, we zitten alleen te twijfelen of we echte spiegels gebruiken of glimmend metaal (iemand een idee). bij de TUD gaan we volgende week de PIC programmeren enz.
) en het idee is zo goed als af, we zitten alleen te twijfelen of we echte spiegels gebruiken of glimmend metaal (iemand een idee). bij de TUD gaan we volgende week de PIC programmeren enz.
Spieels hebben het nadelige effect dat de ze via de zijkant kunnen gaan roesten. Mar als je dat goed dichtmaakt is er niets aan de hand en is het lekker goedkoop ook. (beetje kit)
Metaal idem oxideert ook. Iig is zwembad water voor geen metaal prettig. Mijn idee ga voor spiegels.
Ja maar de spiegels vrezen we in dus dan heb je daar geen last van.
Het enige nadeel is het op maat maken van de spiegels. bij karwei heb je spiegeltegels die zouden we dan kunnen gebruiken maar dan moeten ze wel door de helft worden gesneden. ik weet niet of je dit makkelijk met een tegelsnijder kan doen? (heeft iemand het wel eens gedaan)
daarom is metaal makkelijker omdat het makkelijker te bewerken is.
Hoi marissa,
ik ga mij niet bezig houden met alles opnieuw te lezen.
Die spiegels en water, dat komt niet goed. Binnen een korte termijn kan je deze vervangen.
Volgens mij kom je er met 2 ontvangengers, tenslotte moet je een vertrekpunt en een eindpunt hebben.
Voorbeeld: De bal vertrekt komt voorbij punt 1, teller loopt. De bal komt voorbij punt 2, teller stopt.
Wat heb je dan? De vaste afstand tussen punt1 en punt2 en de tijd die de bal heeft afgelegd tussen die 2 punten.
Nog een tip: spiegels breken als er een bal tegen knotst, als je ze achter een scankoker plaatst kan de bal er niet aan (als de scankoker niet breder is dan de bal natuurlijk).
Dus een verticaal scangordijn voor en na het net.
Klik ook eens op volgende linken:
http://nl.wikipedia.org/wiki/Snelheid
http://nl.wikipedia.org/wiki/Beweging_(natuurkunde)
Eenvoudig en goedkoop?
Groetjes
Ja zo wilden wij het ook doen(zie vorige posts)
We hebben nu wat onderdelen besteld bij Conrad en die zijn gister binnen gekomen. we hebben nu de snsor, laser, ic4511, display en een schakelaar.
We hebben de volgende schakelaar gekocht: http://www.conrad.nl/goto.php?artikel=700738
is deze geschikt of niet??
In vochtige ruimtes is het altijd geboden om een dubbelpolige schakelaar te gebruiken.
Dus is dit een goede schakelaar.
Heb je al eens gezocht op de website van elektuur?
Volgens mij kan dit ook al helpen:
Link: http://www.elektor.nl/artikelen-als-pdf/2007/november/snelheidsmeter-t…
In dat artikel verklaren ze wat ik in mijn vorige post bedoelde en geraak je er wel uit.
Thans het is toch al in de juiste richting mits wat aanpassingen.
Met wat handigheid kan je flitspalen gaan maken. 
Directe downloadlink:
bedankt voor de links!
het is eigenlijk exact hetzelfde als dat wij willen maken! dan zijn dit dus ook de goede schema's denk ik ??? alleen met een andere PIC wij gebruiken PIC16F628A in dit geval van de autootjes wordt er een PIC16f88 gebruikt.
Maar dat had u kunnen weten als u de vorige posts allemaal gelezen had
[Bericht gewijzigd door Marissa op zondag 28 september 2008 21:54:19 (15%)
Eindelijk weer een post van onze kant! We hebben zeker niet stilgezeten. Het raamwerk is zo goed als af, alleen de lasers en sensoren moeten nog geplaatst worden en de electronica moet nog in een kastje gebouwd worden. Onze chip hebben we op de TU geprogrammeerd en die hebben we gister opgehaal. Maar eenmaal thuis gingen we het uitproberen maar er blijft telkens 055 op het display staan. Degene die ons heeft geholpen is op vakantie en aangezien wij geen ervaring hebben met de programmeertaal en dus niet weten wat er fout is dachten we dat jullie ons verder konden helpen. Dit staat nu op de chip geprogrammeerd:
;*******************************************************************************************************
;General information
;*******************************************************************************************************
;Project name: Profielwerkstuk
;Function: Measuring the speed of an object passing two laserbeams
;Designer Marissa en Mariëtte van de Water
;PIC-type: PIC16F628A
;Created: 30-09-2008
;Last editted: 07-11-2008
;Fuses: BODEN=Off WDT=Off PWRT=On Mclr=Off LVP=Off CPD=Off Oscillator= 4MHz Crystal
;*******************************************************************************************************
; Variabal Declaration
;*******************************************************************************************************
PortA equ 05h
PortB equ 06h
TrisA equ 85h
TrisB equ 86h
Status equ 03h
Opt equ 81h
Comp equ 1Fh
T1Con equ 10h
TMR1H equ 0Fh
TMR1L equ 0Eh
DelayCount1 equ 20h
DelayCount2 equ 21h
DelayCount3 equ 22h
Speed equ 23h
G100 equ 24h
G10 equ 25h
G1 equ 26h
ValH equ 27h
ValM equ 28h
ValL equ 29h
#define Carry Status, 0
#define Zero Status, 2
#define S1 PortA, 4
#define S2 PortA, 5
;*******************************************************************************************************
;Initialisation
;*******************************************************************************************************
org 00h
movlw b'00000111'
movwf Comp ;set comparators Off
movlw b'00000000'
movwf T1Con ;set timers (off)
bsf Status, 5
movlw b'00110000'
movwf TrisA ;set the ports of Port A
movlw b'00000000'
movwf TrisB ;set the ports of Port B
bcf Status, 5 ;move back to bank 0
clrf PortA
clrf PortB ;clear outputs
;*******************************************************************************************************
;Main Program
;*******************************************************************************************************
MAIN ;start main program
clrf TMR1L
clrf TMR1H
btfss S1
goto $ - 1
movlw b'00000001'
movwf T1Con ;set timers (on)
btfss S2
goto $ - 1
movlw b'00000000'
movwf T1Con ;set timers (off)
movlw d'1'
movwf ValH
movlw d'74'
movwf ValM
movlw d'165'
movwf ValL
clrf Speed
Loop incf Speed, F
movfw TMR1L
subwf ValL, F
btfsc Carry
goto MByte
movlw 01h
subwf ValM, F
btfsc Carry
goto MByte
movlw 01h
subwf ValH, F
btfss Carry
goto display
MByte movfw TMR1H
subwf ValM, F
btfsc Carry
goto Loop
movlw 01h
subwf ValH, F
btfss Carry
goto display
goto Loop
display
decf Speed, F
clrf G100
clrf G10
clrf G1
movlw d'100'
subwf Speed, F
incf G100, F
btfsc Carry
goto $ - 4
movlw d'100'
addwf Speed, F
decf G100, F
movlw d'10'
subwf Speed, F
incf G10, F
btfsc Carry
goto $ - 4
movlw d'10'
addwf Speed, F
decf G10, F
movlw d'1'
subwf Speed, F
incf G1, F
btfsc Carry
goto $ - 4
movlw d'1'
addwf Speed, F
decf G1, F
movfw G100
movwf PortA
movfw G10
movwf PortB
swapf PortB, F
movfw G1
addwf PortB, F
goto MAIN
end
***********************************************************
Zien jullie ergens een fout?
We hebben ook wat foto's: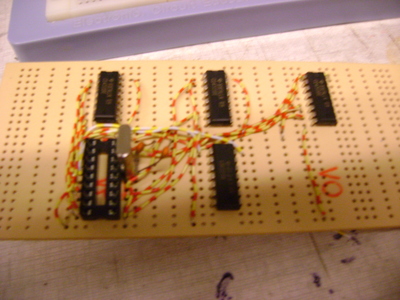
en alles aan elkaar: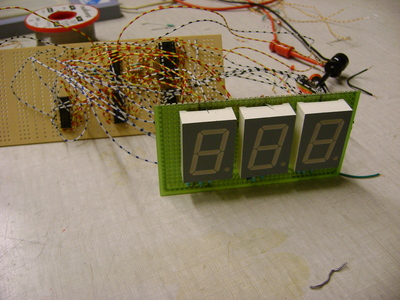
en het frame gemaakt van aluminium hoek profielen aan elkaar gemaakt met kunstof en bevestigt met popnagels aan elkaar (we hadden deze profielen thuis nog liggen van de koelcel)
hopelijk kunnen jullie ons helpen!
Bedankt!
Lekker gedocumenteerd stukje code hebben die lui gemaakt trouwens.. NOT! (Maargoed, als het werkt...)
Ik kan zo 1,2,3 effe niet het uiteindelijke schema vinden, kun je die nog even linken?
/e: maak die rijen sterren even een stuk korter, en zet je code tussen [code] [/code] tags.
Hier is het schema:
Klik erop voor vergroting.
de code dan nog een keer:
code:
;****************************************************
;General information
;**********************************************************
;Project name: Profielwerkstuk
;Function: Measuring the speed of an object passing two laserbeams
;Designer Marissa en Mariëtte van de Water
;PIC-type: PIC16F628A
;Created: 30-09-2008
;Last editted: 07-11-2008
;Fuses: BODEN=Off WDT=Off PWRT=On Mclr=Off LVP=Off CPD=Off Oscillator= 4MHz Crystal
;**********************************************************
; Variabal Declaration
;**********************************************************
PortA equ 05h
PortB equ 06h
TrisA equ 85h
TrisB equ 86h
Status equ 03h
Opt equ 81h
Comp equ 1Fh
T1Con equ 10h
TMR1H equ 0Fh
TMR1L equ 0Eh
DelayCount1 equ 20h
DelayCount2 equ 21h
DelayCount3 equ 22h
Speed equ 23h
G100 equ 24h
G10 equ 25h
G1 equ 26h
ValH equ 27h
ValM equ 28h
ValL equ 29h
#define Carry Status, 0
#define Zero Status, 2
#define S1 PortA, 4
#define S2 PortA, 5
;**********************************************************
;Initialisation
;**********************************************************
org 00h
movlw b'00000111'
movwf Comp ;set comparators Off
movlw b'00000000'
movwf T1Con ;set timers (off)
bsf Status, 5
movlw b'00110000'
movwf TrisA ;set the ports of Port A
movlw b'00000000'
movwf TrisB ;set the ports of Port B
bcf Status, 5 ;move back to bank 0
clrf PortA
clrf PortB ;clear outputs
;**********************************************************
;Main Program
;**********************************************************
MAIN ;start main program
clrf TMR1L
clrf TMR1H
btfss S1
goto $ - 1
movlw b'00000001'
movwf T1Con ;set timers (on)
btfss S2
goto $ - 1
movlw b'00000000'
movwf T1Con ;set timers (off)
movlw d'1'
movwf ValH
movlw d'74'
movwf ValM
movlw d'165'
movwf ValL
clrf Speed
Loop incf Speed, F
movfw TMR1L
subwf ValL, F
btfsc Carry
goto MByte
movlw 01h
subwf ValM, F
btfsc Carry
goto MByte
movlw 01h
subwf ValH, F
btfss Carry
goto display
MByte movfw TMR1H
subwf ValM, F
btfsc Carry
goto Loop
movlw 01h
subwf ValH, F
btfss Carry
goto display
goto Loop
display
decf Speed, F
clrf G100
clrf G10
clrf G1
movlw d'100'
subwf Speed, F
incf G100, F
btfsc Carry
goto $ - 4
movlw d'100'
addwf Speed, F
decf G100, F
movlw d'10'
subwf Speed, F
incf G10, F
btfsc Carry
goto $ - 4
movlw d'10'
addwf Speed, F
decf G10, F
movlw d'1'
subwf Speed, F
incf G1, F
btfsc Carry
goto $ - 4
movlw d'1'
addwf Speed, F
decf G1, F
movfw G100
movwf PortA
movfw G10
movwf PortB
swapf PortB, F
movfw G1
addwf PortB, F
goto MAIN
end
Wij dachten zelf dat er nu telkens een vaste waarde is die wordt ingevuld en niet de tijd tussen de twee sensoren maar dat weten we niet zeker.