Ik volg ook al een tijdje deze topic omdat hij enkele elementen bevat waar ik ook regelmatig mee geconfronteerd wordt. Maar ik mist toch enkele elementaire belangrijke elementen in de definitie van dit profielwerkstuk. Het geheel is weinig gedefinieerd met het gevolg dat er veel te veel voorstellen gemaakt worden die mijn inziens totaal onbruikbaar zijn.
Van de TS zou ik minstens een betere specificatie omschrijving verwachten. Zoals:
- wat is de maximale te meten snelheid.
Dit bepaald immers in grote mate de detectors. Vanaf een bepaalde waarde zullen heel veel voorgestelde systemen afvallen.
- Wat is de miniale diameter die moet kunnen gedetecteerd worden. Dit bepaald vooral de afstand tussen de onderlinge scanlijnen of resolutie van het meetsysteem. Een pijl detecteren is niet hetzelfde als een voetbal. Dus legt minstens die minimale eisen vast.
- Wat is de te verwachten nauwkeurigheid. Is die heel hoog dan speeld de afronding van vb een bal tov de scanlijnen reeds een belangrijke rol. Ook de afstand van de 2 meetzones wordt hierdoor sterk bepaald.
- Een soort kader lijkt wenselijk. Geef dan tenminste de minimale afmetingen op waaraan moet voldaan worden. Vanuit dit standpunt kunnen berekeningen gedaan worden of bepaalde scansystemen haalbaar zijn. Ook het omgevingslicht kan een rol spelen. Vermeld dan in de specificatie's dat het al of niet moet kunnen werken in volle zon.
Jullie project valt of staat bijna uitsluitend met de detectie methode. De berekening en aanduiding van de snelheid opzich is kinderspel tov van de meetmethode.
Ik gebruik detectie voor vliegende insecten. Die gaan tot 40 m/sec in een opname kader van 40x60mm. Die reactiesnelheid ligt in de uSec, geen msec. Alle TSOPxxx varianten zijn gewoon uitgesloten bij deze snelheden. gewoon om maar iets te noemen.
Ik weet van oplossingen voor het fotograferen van vliegende vleermuizen in het donker. Die beestjes vliegen ook zo snel en die vragen een detectiekader van minstens 1m x 1m. Die kader staat doorgaans opgesteld aan de uitgang van de grotten waar ze overdag schuilen. Als ze s'nachts daardoor vliegen kan de start gegeven worden voor opname zodat ze haarscherp weergegeven worden op de foto. Er is weinig of geen speling in de afstand want anders staan ze niet scherp op de foto. En de snelheid is heel hoog.
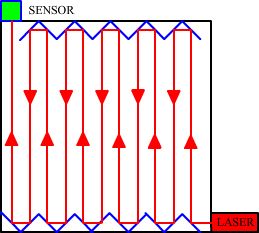
Vermoedelijk zal een beste oplossing in de richting van een kader gaan met een gescande laserstraal. Je kunt daarbij de raster vastleggen die overeenkomt met de minimale te verwachten diameter die moet kunnen gedetecteerd worden. Als je de max snelheid weet kun je ook vastleggen op welke afstand je tweede detectiekader moet staan. Maar daarvoor moet je eerst je minimale eisen voor de afmetingen van zo een kader vastleggen.
Zodra er meer specificatie's vastleggen kan er nauwkeuriger voorstellen uitgewerkt worden. Zo moet je minstens kijken naar de detector vertragingen die voorkomen in het systeem. Zijn die te hoog dan vallen die zo uit de boot.