

Joeri de Man,
Je maakt het veel te moeilijk met je spiegelopstelling. voor zo een scan worden gewone vlakke spiegels gebruikt. Die stel je lichtjes onder een hoek op. De hoek bepaald de afstand tussen de weerkaatste stralen. Je moet enkel 2 spiegel strippen laten snijden van vb 1m x 5 cm en ze met fijnregelschroeven op een drager opstellen. Je laser en detector mogen dan op dezelfde plaats zitten zoals op je tekening maar de sensor mag ook aan de kant van de laser zitten. De laserstralen lopen dan iets schuin volgens je gewenste hoek.
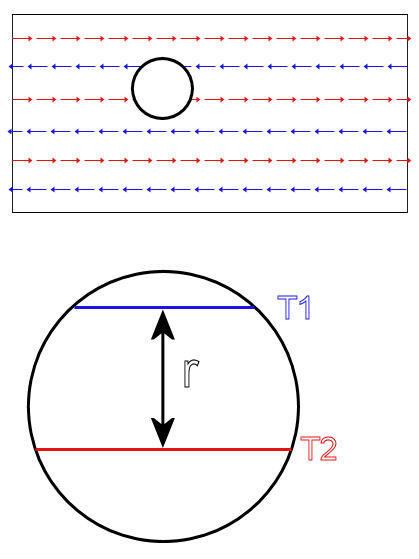
Wil je een bal van 5cm nog kunnen detecteren dan zou ik 4 cm nemen als spoed van de stralen. Vanuit dit standpunt kun je dan je maximale fout berekenen als de bal net centraal tussen de 2 stralen passeerd en langs de 2de frame vb juist centraal op een straal. Als je even een tekening maakt kan je direct het verschil in afgelegde weg opmeten. Dit verschil samen met de totale afstand tussen de 2 frames is een maat voor de fout die kan optreden.
Als de laserframes op vb 10 cm van elkaar gemonteerd zijn kun je ze mechanisch gemakkelijk in dezelfde raamhouder monteren. Dit zou tengoede komen aan de stabiliteit. Zitten beide laserkaders slechts op 10 cm dan zal de hoek waaronder de bal doorgaat weinig invloed hebben. Die foutrange berekenen is niet moeilijk. Maar fout zal er altijd zijn. Het is de taak van de ontwerper om dit te omschrijven en eventueel de werkbare hoek in de beschrijving vast te leggen. Die hoekfout ook wegwerken vergt een veel verder doorgedreven meetopstelling en een andere benadering. je moet bijgevolg eerst even uitrekenen voor je met de realisatie begint of het haalbaar is en niet wachten tot alles gemaakt is om deze beperking te ontdekken. Dit maakt deel uit van de voorstudie van je ontwerp.
Met een straalafstand van 4 cm en een hoogte van 1m heb je 25 x de breedte nodig als afstand voor de laser. Dit komt overeen met 25m maar je moet nogeens rekenen op een demping van de stralen. Ook spiegels zijn niet perfect en je gaat nooit de opgegeven ideale afstandsbereik bekomen. Maar lasers zullen niet gauw een beperking zijn. Ik gebruik hier groene 10 mw laserpointers en die zie je overdag in de volle zon heel gemakkelijk op de huizen 300m verder. In het donker zie je ze enorm ver inclusief de straal zelf. De range van zo een straal is minstens 10km.
Ik heb ook IR laserpointers van 940 nm 30 mw. Die liggen in het onzichtbare gebied. Bij die lasers is het vermogen instelbaar met een kleine potmeter. Nadeel van deze lasers is dat je ze zelf ook niet ziet waardoor je gebruik moet maken van een speciale laserdetectiekaart om de straal te zien. Zo een kaartje kost rond de 9 euro maar die lasers kosten rond de 30 euro per stuk.
Andere 850 nm ir lasers heb ik bij digi-key besteld, zitten ook in het onzichtbare gebied en zijn ook regelbaar in vermogen. Kostprijs was iets goedkoper. Bij al mijn ir lasers kun je de straal van de laser afstellen maar op die spiegels weet ik niet zo direct of je dit nog optimaal kunt doen. Met de groene lasers is en blijft de straal over het ganse traject enorm fijn waardoor ik denk dat die beter geschikt zijn. Door hun grote helderheid ook in de volle zon heb je geen last van het omgevingslicht. De ontvanger wordt in een buisje geplaatst zodat zijdelijkse lichtinval geen invloed heeft.
Je buget eerst vastleggen is ook belangrijk. Doorgaans wordt dit vergeten en krijg je de gekste oplossingen die dan achteraf weer totaal zinloos blijken vanwege de hoge prijs. Een prijsschatting maakt deel uit van je ontwerp en staat zeker bovenaan de lijst.
Ik weet dat een CPLD/FPGA chip als oplossing enorm snel gaat maar ik ben ook overtuigd dat eenderwelke AVR of PIC controller deze berekeningen aankan. Enkel de manier hoe je de detectie binnenneemt zal wat kritisch zijn maar een goedgekozen methode zal perfect werken. de controllers hebben voldoende periferie aanboord om deze signalen in de us range te capteren. De omrekening zelf is zeker geen probleem en die kostprijs is zeker heel laag. Je buget zal dus vooral naar de realisatie van je kader met lasers en detectors gaan.
Mocht je afstand van de laserstralen toch te groot zijn dan kun je ook met 2 of meerdere lasers werken. De eigenspoed van de stralen mag dan die factor 2 of meer zijn waardoor je minder heen en weer geloop bekomt per straal. Je moet dan wel de kostprijs van de lasers en detectors in rekening brengen. Detector met een BPW34 en enkele weestandjes kosten heel weinig. Spiegel strippen kun je laten snijden en is ook betaalbaar ( kun je verkrijgen tot verschillende meters lengte)
Er zit nogal wat werk in. Wat laser techniek, algemene electronica, en vooral mechanica. Als je helemaal geen bouw tallent bezit vrees ik een beetje voor het resultaat. Maar er zijn er toch zeker die zoiets aankunnen. Ik zou het in ieder geval een mooie uitdaaging vinden.
Update:
De gewone rode zichtbare laser is de goedkoopste. Ik heb die 8 euro betaald en die zie je perfect. Nadeel van die iets wat goedkopere laserpointers is de spreiding in de straal. ik had er 10 stuks gekocht en ze waren bijna allemaal verschillend. Ze zitten ook niet perfect inlijn met hun behuizing waardoor je regeling ruimer moet voorzien. Die lasers liggen rond de 650 nm. De groene lasers van 10 mw zijn duurder en hebben rond de 60 euro gekost maar zijn intussen wel verlaagd in prijs.

 De snelheid en nauwkeurigheid heeft ook heeel veeel te maken met je kennis van programmeren.
De snelheid en nauwkeurigheid heeft ook heeel veeel te maken met je kennis van programmeren.